���F���̙C(j��)е�W(w��ng)ԭ��(chu��ng)���҂���Ҋ(ji��n)�ķ��P�ھ�C(j��)�M(j��n)���ھ����I(y��)�r(sh��)�������ͨ����(hu��)���]һ��(g��)����(sh��)��������Ǿ����ھ�����������������������ڜ�����������혶�^��������ڵػ��ȵ����I(y��)�r(sh��)����Ҫ����һ��(g��)��(bi��o)��(zh��n)����ȁ�(l��i)�ھ��B�b܇(ch��)Ҳ��횿��]�ھ��������������ͻȻ��̫�����̫����������͕�(hu��)Ӱ푵�܇(ch��)��������g��Ӱ푹���Ч����������������Ҫ�ȸߵ����I(y��)�r(sh��)��ֻ��ͨ�^(gu��)��������x����(l��i)�o���y(c��)���������������Ҋ(ji��n)�ľ���ˮ��(zh��n)�x���������������ÿ��(g��)���ض���(hu��)�Ѓx���y(c��)�����������ʹ�Ѓx��Ҳ����(hu��)�r(sh��)�r(sh��)�y(c��)����������ڛ](m��i)�Ѓx���ĕr(sh��)����������{�T��ֻ��ͨ�^(gu��)�۾�����(l��i)��Ӌ(j��)�������������Թ�Ӌ(j��)��ȳ����ھ�C(j��)�{�T�ı����n֮һ��������кܶ�“ˮƽ”���õ��ھ�C(j��)�{�T��ž����@һ�n�](m��i)���������
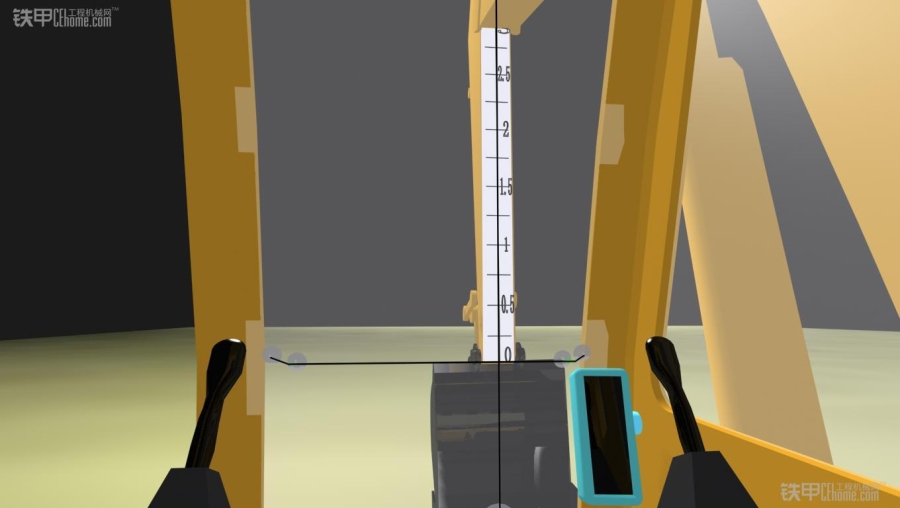
�Ҿ���һ���ھ�C(j��)�{�T���Ҿͽ�(j��ng)������ȹ�Ӌ(j��)�e(cu��)�`����������������X(ju��)�ÿ����ۿ���������l(shu��)Ҳ�_�������������Ҫ����90���Ͳ���1���������Ҫ����1�ײ���1.2������������˽�Q�@��(g��)���������Ұl(f��)����һ��(g��)�b������������X(ju��)���������ˮ��(zh��n)�x��ԭ��ֱ�������ھ�C(j��)�������������߅�ھ�߅������Ȕ�(sh��)��(j��)����������O(sh��)Ӌ(j��)ԭ�����@�ӵģ����ھ�C(j��)��С�ۣ����U����(n��i)��(c��)һ�����ӿ̶ȳ��������(��D1��ʾ)����������ھ�C(j��)�{��ҵ�ǰ����������һ��(g��)ʮ�ֶ�λ����(bi��o)�����������D2��ʾ����������@��(g��)��λ����(bi��o)�����P(p��n)�;�(xi��n)�M�ɣ�ֱ�������ڲ�������������{�T�^(gu��)�����ϵĶ�λ����(bi��o)���ܿ���С���Ͽ̶ȳߵ�����(y��ng)�Ĕ�(sh��)���������Ҳ�S���(hu��)��(w��n)��������@�Ӿ��ܿ����ھ�����ˆ���������Dz���̫��(ji��n)��������������V�����������(d��ng)Ȼ�](m��i)���@ô��(ji��n)����������@ֻ�Ǵ��µ�ԭ���������߀�кܶ༚(x��)��(ji��)�f(shu��)����������҂�һ�c(di��n)һ�c(di��n)��(l��i)�����������
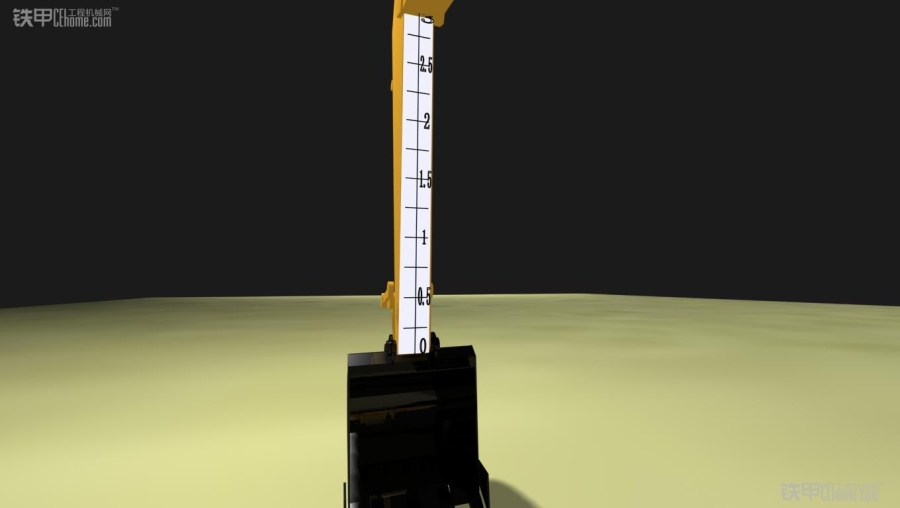
���ھ�C(j��)С�ۃ�(n��i)��(c��)���ӿ̶ȳ�
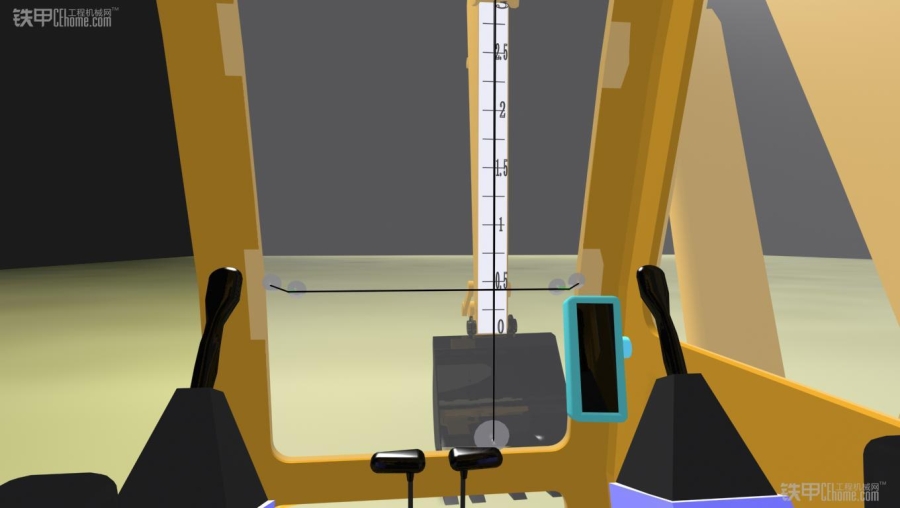
����Ҫͨ�^(gu��)С�ۣ����U����(l��i)�y(c��)��������������С�۾��(l��i)����ˮ��(zh��n)�x�Ę�(bi��o)�����������(bi��o)��Ҫ��ֱ�Q�����ܜy(c��)������(zh��n)�_���������������ھ�C(j��)�����r(sh��)��С����ǰ�����\(y��n)��(d��ng)������������Ӳ���֪���������С�ۺΕr(sh��)̎�ڴ�ֱ�Εr(sh��)�ֲ�������������䌍(sh��)��Q�@��(g��)��(w��n)�}�ܺ�(ji��n)�������������С�۰�����ۣ���(d��ng)�ۣ����P�����������̎���ھ�C(j��)�{��ҵ��҂�(c��)������������{�T�����r(sh��)���۾�����̎��С�۵��\(y��n)��(d��ng)ƽ���(n��i)�������������С���\(y��n)��(d��ng)ƽ��Ă�(c��)��������������҂�ֻҪ��С�ۿ̶ȳߵ����g����һ�l�о�(xi��n)����������{��ҵIJ����������P(p��n)�̶��Q���һ�l��(xi��n)��������{�T�۾����ܿ����ɗl��(xi��n)�دB�r(sh��)�����������С�۵�һ��(g��)�̶�λ�������������ͨ�^(gu��)�{(di��o)�����P(p��n)��(l��i)�O(sh��)���@��(g��)�̶�λ�Þ鴹ֱ�Q�������������D2���D3��������D4��(du��)����ʾ����������D2��С��������^(gu��)�˴�ֱλ�Õr(sh��)��������D4��С���ջس��^(gu��)�˴�ֱλ�Õr(sh��)�������ֻ�ЈD3��ʾ��������ɗl��(xi��n)�����دB��������f(shu��)���˕r(sh��)С������̎�ڴ�ֱλ���������
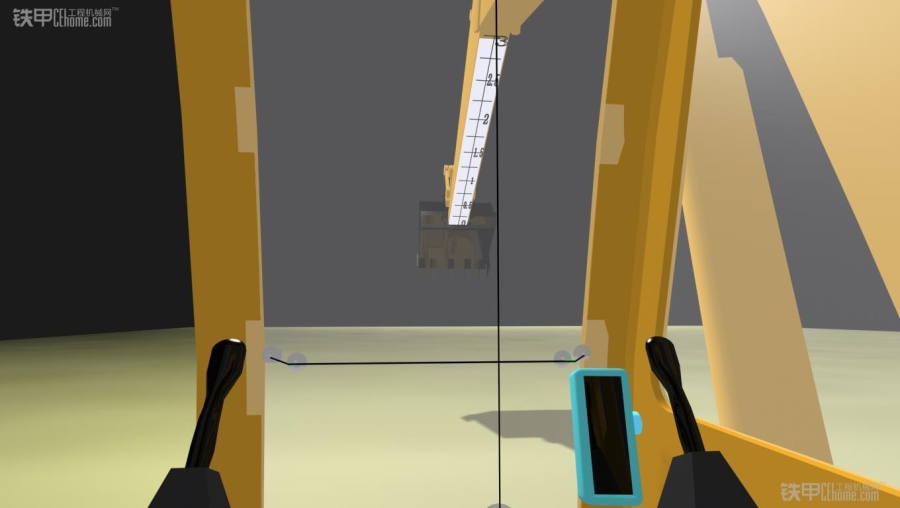
���D2��С��������^(gu��)�˴�ֱλ��
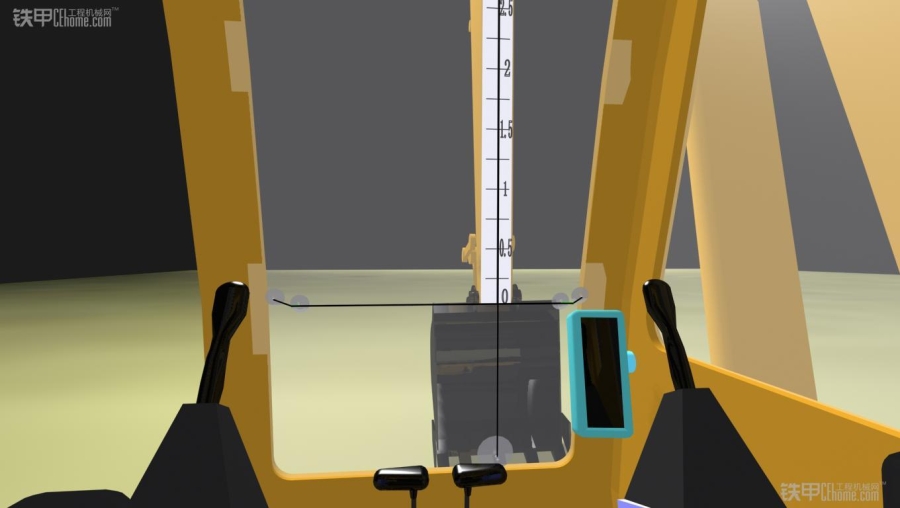
���D3��С�ۺͿ̶Ⱦ�(xi��n)�����غ�
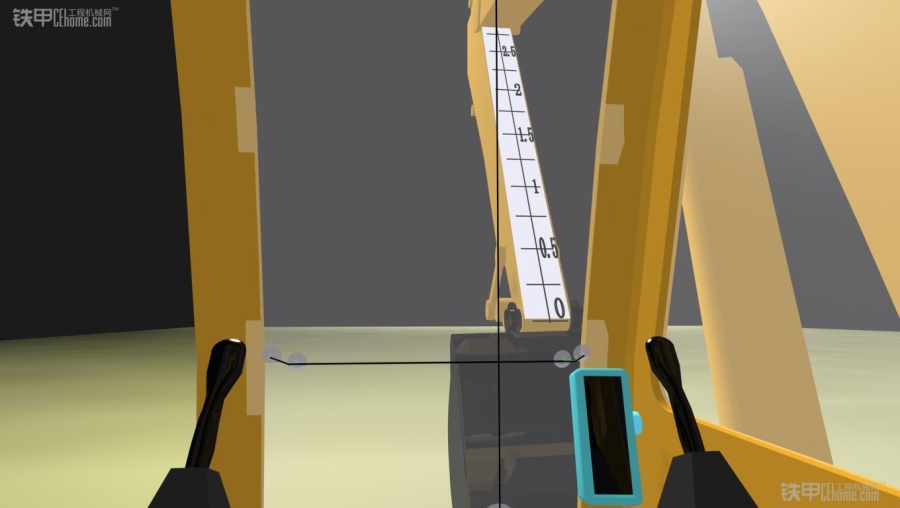
���D4��С���ջس��^(gu��)�˴�ֱλ��
�_����С�۴�ֱ��������ǽ���(l��i)�����xȡ��(sh��)ֵ������������Ҳ�Ǻʹ_��С�۴�ֱλ�õķ���һ����������ο����{��Ҳ���������һ�l�M��ľ�(xi��n)��������ǿ϶��Dz�������������?y��n)��{�T���X��������ʼ�K��һ��(g��)λ�ò���(d��ng)��������������л΄�(d��ng)����(sh��)ֵ�Ͳ���(zh��n)�����������Q�@��(g��)��(w��n)�}Ҳ�ܺ�(ji��n)������������Ƕ�����һ�l�M��Ķ�λ��(xi��n)��������ɗl��(xi��n)��֧�U���_(k��i)һ���ľ��x��������ɂ�(g��)�c(di��n)�_��һ�l��(xi��n)��������@�����{�T�۾������ăɗl�M��λ��(xi��n)�دB�r(sh��)��(du��)��(y��ng)��С�ۿ̶ȳߔ�(sh��)ֵ������������҂���Ҫ�Ĕ�(sh��)ֵ�������

������һ�l�M��Ķ�λ��(xi��n)�����xȡ��(sh��)ֵ
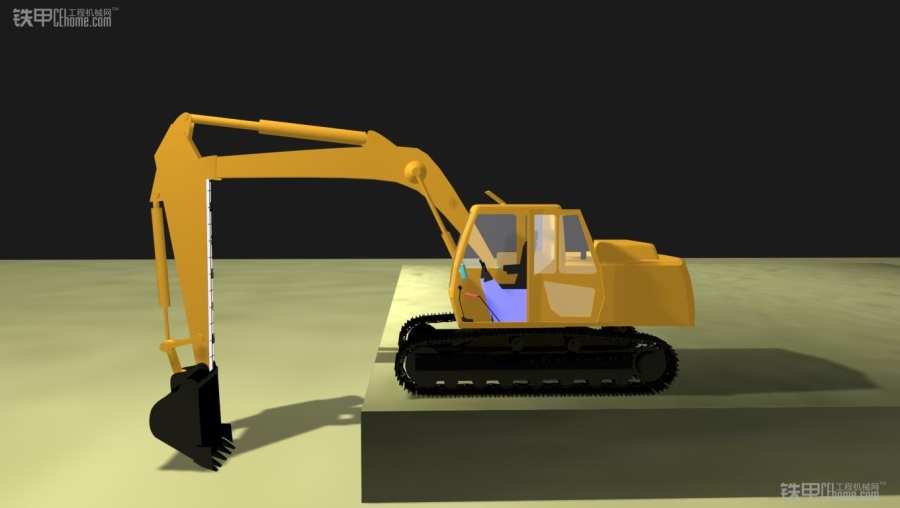
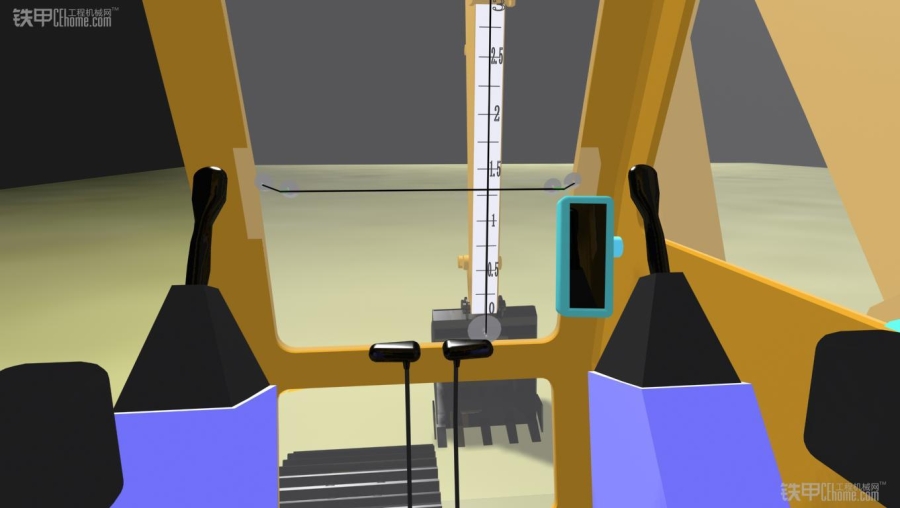
߀��һ��(g��)��(w��n)�}���ǣ�ˮ��(zh��n)�x�ڹ���ǰ���������Ҫ���{(di��o)ԇ��ˮƽλ����������Dz����@��(g��)�b���Dz���ҲҪʹ�ھ�C(j��)���Ď�ͣ��һ��(g��)ˮƽ��ƽ����������������M���Ǻ��y�_(d��)��Ҫ����������ش��@��(g��)��(w��n)�}�Ĵ��������������Ҫ���������?y��n)��cˮ��(zh��n)�x���в�ͬ������������@���b�õ�ԭ��������������ھ�C(j��)̎��ͬһλ�Õr(sh��)�������ͨ�^(gu��)Ӌ(j��)��ԭ�����c�ھ�ײ��ăɴΜy(c��)����(sh��)��(j��)֮�����������(l��i)�ó����ھ�ԭ���浽�ھ�ײ������������������Ǐ�ͣ�C(j��)ƽ�浽�ھ�ײ�����������������D6���D7��������D8��������D9��ʾ����������D6���P��̎��ԭ����Ă�(c��)��ҕ�D��������D7���P��̎��ԭ������{�Tҕ��ҕ�D��������ˈD�@ʾ�˕r(sh��)�̶ȳߔ�(sh��)�֞�0��������D8���P��̎���ھ���ײ��Ă�(c��)��ҕ�D��������D9���P��̎���ھ���ײ����{�Tҕ��ҕ�D��������ˈD�˕r(sh��)�̶ȳߔ�(sh��)�֞�1.3�����������ͨ�^(gu��)Ӌ(j��)��1.3-0=1.3��������˕r(sh��)���ھ���Ȟ�1.3���������
���D6���P��̎��ԭ����Ă�(c��)��ҕ�D
���D7���P��̎��ԭ������{�Tҕ��ҕ�D
���D8���P��̎���ھ���ײ��Ă�(c��)��ҕ�D
���D9���P��̎���ھ���ײ����{�Tҕ��ҕ�D
߀��һ��(g��)��(w��n)�}������������P���ھ�돽��������c�y(c��)�����ȵĆ�(w��n)�}�����������ɴΜy(c��)���r(sh��)�P������̎��ͬһ��(g��)λ�ã��͕�(hu��)���F(xi��n)��ͬ���P���\(y��n)��(d��ng)�돽���������(d��o)��Ӱ푶���(l��i)������������mȻ�@��(g��)�`����ܺ�С�������ijЩ���I(y��)�r(sh��)���Ժ�������������������Ҫ�ȸߵ����I(y��)�r(sh��)��ô�k�����������Q����Ҳ�ܺ�(ji��n)��������������ڜy(c��)���r(sh��)���P��ƽ����������X�����������������������(zh��n)�_�o(w��)�`�������������D10��������D11��������D12��������D13���������ʾ�����D10���P��ƽ����ԭ����Ă�(c��)��ҕ�D��������D11���P��ƽ����ԭ������{�Tҕ��ҕ�D��������ˈD�@ʾ�˕r(sh��)�̶ȳߔ�(sh��)�֞�0.4��������D12���P��ƽ�����ھ���ײ��Ă�(c��)��ҕ�D��������D13���P��ƽ�����ھ���ײ����{�Tҕ��ҕ�D��������ˈD�˕r(sh��)�̶ȳߔ�(sh��)�֞�1.7�����������ͨ�^(gu��)Ӌ(j��)��1.7-0.4=1.3��������˕r(sh��)���ھ���Ȟ�1.3���������
���D10���P��ƽ����ԭ����Ă�(c��)��ҕ�D
���D11���P��ƽ����ԭ������{�Tҕ��ҕ�D
���D12���P��ƽ�����ھ���ײ��Ă�(c��)��ҕ�D
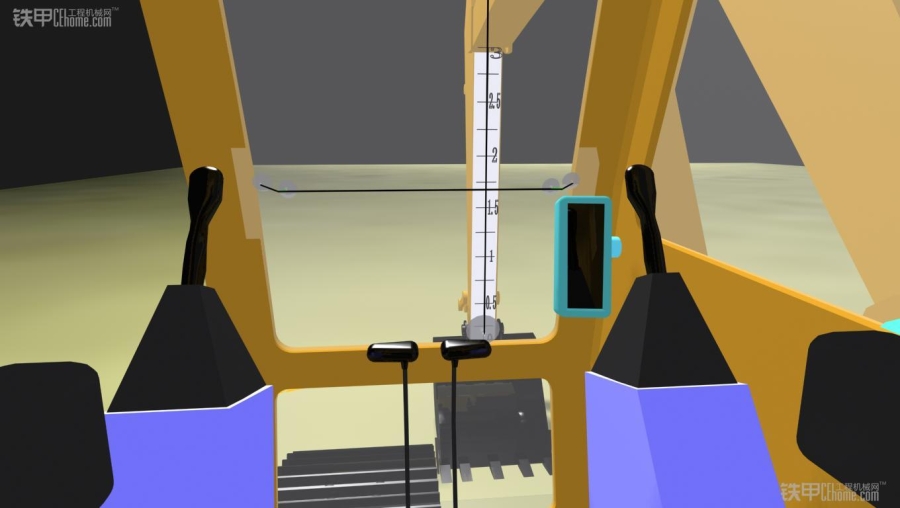
���D13���P��ƽ�����ھ���ײ����{�Tҕ��ҕ�D
��(d��ng)Ȼ�@���b��Ҳ��Щ����֮̎������������ڴ_��С�۴�ֱ�r(sh��)����������ڴ��Ӱ�С�۵ĸߵ�ǰ�����������������ӡ�Q��λ��(xi��n)��С�ۿ̶ȳ��о�(xi��n)�r(sh��)����������Խ������������͕�(hu��)Ҫ���{�T���X�����ҿ�һ�c(di��n)���������(d��ng)�����ϕr(sh��)������Ҫ�{�T�X������һ�c(di��n)���������(d��ng)Ȼֻ��С���x�Ĕ[��(d��ng)�������������(hu��)Ӱ푵��{��������߀��һ�c(di��n)����֮̎�������������С���L(zh��ng)�ȵ�������������������˜y(c��)�����������������Ҳ�����f(shu��)�������С���ж��L(zh��ng)��ֻ�ܜy(c��)��������������߀�����P���ĸ߶�Ӌ(j��)���M(j��n)ȥ����������˾͜y(c��)�������������20����(j��)���ھ�C(j��)���y(c��)����ȴ�ž���4��5�ײ����Ę����������С��Ҳ�����ڃ���3�ײ����Ę�������������^(gu��)�@Ҳ���ԑ�(y��ng)��һ��Ĺ����������������
����X(ju��)���@��(g��)�b����ô�ӣ������������ھ�C(j��)�{�T��������X(ju��)�ÿ����{�T��(du��)�ھ�����Г�(j��)�������������e��Ӌ(j��)��ȵĕr(sh��)�����������(du��)�ھ�C(j��)�{���������������

 ����/���L(zh��ng)��
��С��/���L(zh��ng)��  �ھ�C(j��)�ڶ�
�ھ�C(j��)�ڶ�  ���(d��ng)�N/��ϵ��
���(d��ng)�N/��ϵ��  Һ����/Һ���Q
Һ����/Һ���Q  ������
������ 
 �����N
�����N  ץľ������ʽץצ��
ץľ������ʽץצ��  ץ�Q����÷��ץצ��
ץ�Q����÷��ץצ��  ��Q�b��
��Q�b�� 







 (li��n)ϵ�҂� Contact us
(li��n)ϵ�҂� Contact us 
 �Ŷ��S�a
�Ŷ��S�a  �����S�a
�����S�a